




CoDyCo - Project number: 600716
Small or medium scale focused research project (STREP)
FP7-ICT-2011.2.1 Cognitive Systems and Robotics (b)
EC contribution: 3,175,000.00 €
Coordinator: Francesco Nori, IIT
01/03/2013 - 28/02/2017
Duration: 4 years
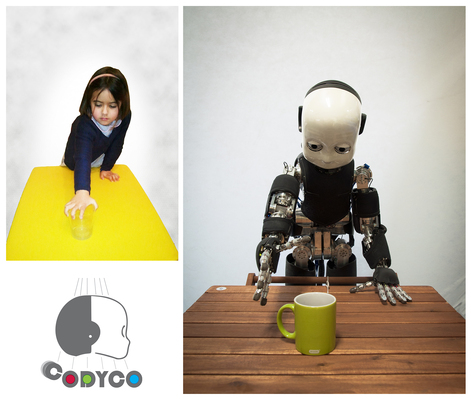
The aim of CoDyCo is to advance the current control and cognitive understanding about robust, goal- directed whole-body motion interaction with multiple contacts. The CoDyCo project is a four-years long project and starts in March 2013. At the end of each year a scenario will be used to validate on the iCub ![]() the theoretical advances of the project.
the theoretical advances of the project.
ABSTRACT
The aim of CoDyCo is to advance the current control and cognitive understanding about robust, goal- directed whole-body motion interaction with multiple contacts. CoDyCo will go beyond traditional approaches: (1) proposing methodologies for performing coordinated interaction tasks with complex systems; (2) combining planning and compliance to deal with predictable and unpredictable events and contacts; (3) validating theoretical advances in real-world interaction scenarios.
First, CoDyCo will advance the state-of-the-art in the way robots coordinate physical interaction and physical mobility. Traditional industrial applications involve robots with limited mobility. Consequently, interaction (e.g. manipulation) was treated separately from whole-body posture (e.g. balancing), assuming the robot firmly connected to the ground. Foreseen applications involve robots with augmented autonomy and physical mobility. Within this novel context, physical interaction influences stability and balance. To allow robots to surpass barriers between interaction and posture control, CoDyCo will be grounded in principles governing whole-body coordination with contact dynamics.
Second, CoDyCo will go beyond traditional approaches in dealing with all perceptual and motor aspects of physical interaction, unpredictability included. Recent developments in compliant actuation and touch sensing allow safe and robust physical interaction from unexpected contact including humans. The next advancement for cognitive robots, however, is the ability not only to cope with unpredictable contact, but also to exploit predictable contact in ways that will assist in goal achievement.
Third, the achievement of the project objectives will be validated in real-world scenarios with the iCub ![]() humanoid robot engaged in whole-body goal-directed tasks. The evaluations will show the iCub exploiting rigid supportive contacts, learning to compensate for compliant contacts, and utilizing assistive physical interaction.
humanoid robot engaged in whole-body goal-directed tasks. The evaluations will show the iCub exploiting rigid supportive contacts, learning to compensate for compliant contacts, and utilizing assistive physical interaction.
METHODOLOGY
Methodologically, CoDyCo activities are divided into four categories, deeply intertwined: control theory, machine learning, human behavioural experiments and software development. Each of them serve CoDyCo’s objectives to: 1) develop a general software toolkit for whole-body dynamics computation with multiple external contacts, 2) conduct human behavioural studies for understanding human use of external contact, including interpersonal cooperative contacts in natural whole body tasks, 3) develop a control architecture for whole body coordination and regulation of whole body compliance, and 4) leverage machine learning methods for acquiring models of compliant contact with the environment and physical interactions with humans